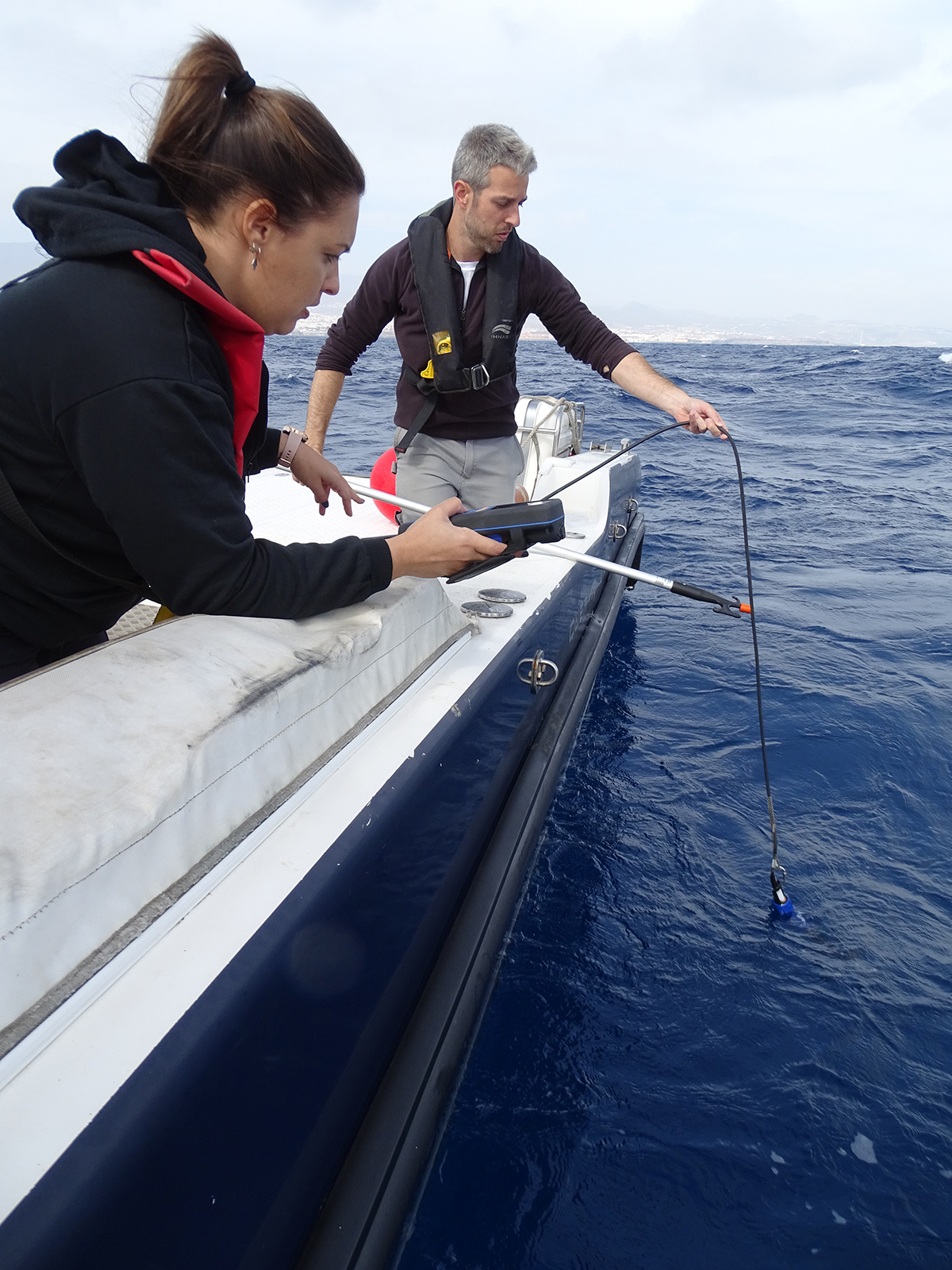
Access provider: PLOCAN
End User: University College London
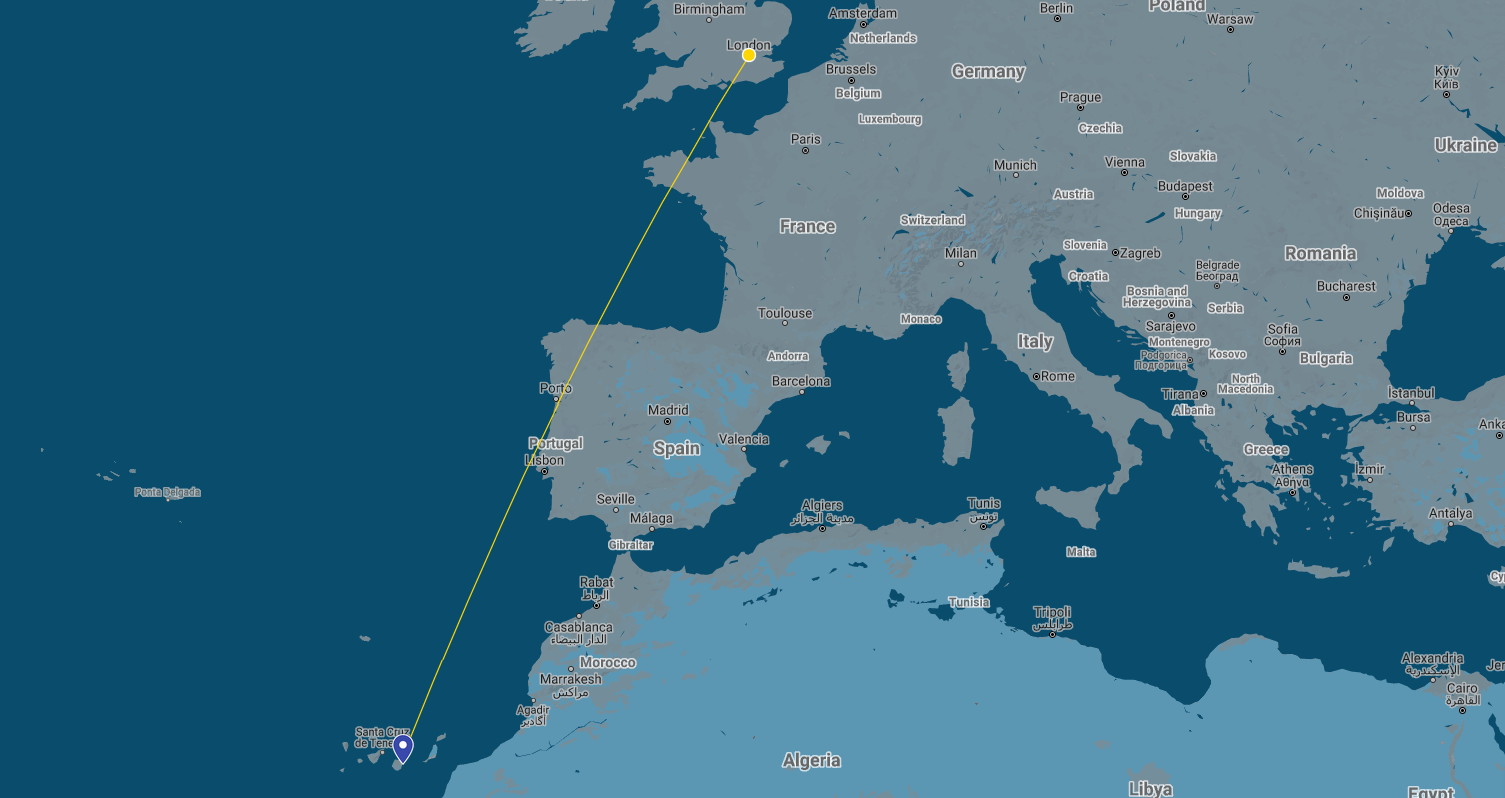
Dates: 17/02/2020 to 27/02/2020
GOAL: To develop a model to simulate the behaviour of an autonomous submarine glider when in operation.
The operation has been carried out through a transnational access and has been carried out in collaboration with Dr. Enrico Anderlini, associate researcher in naval architecture at University College London, and is expected to allow the automation of decision-making while piloting underwater gliders. offshore, which can help to operate large glider fleets efficiently in the future and thus reduce costs.
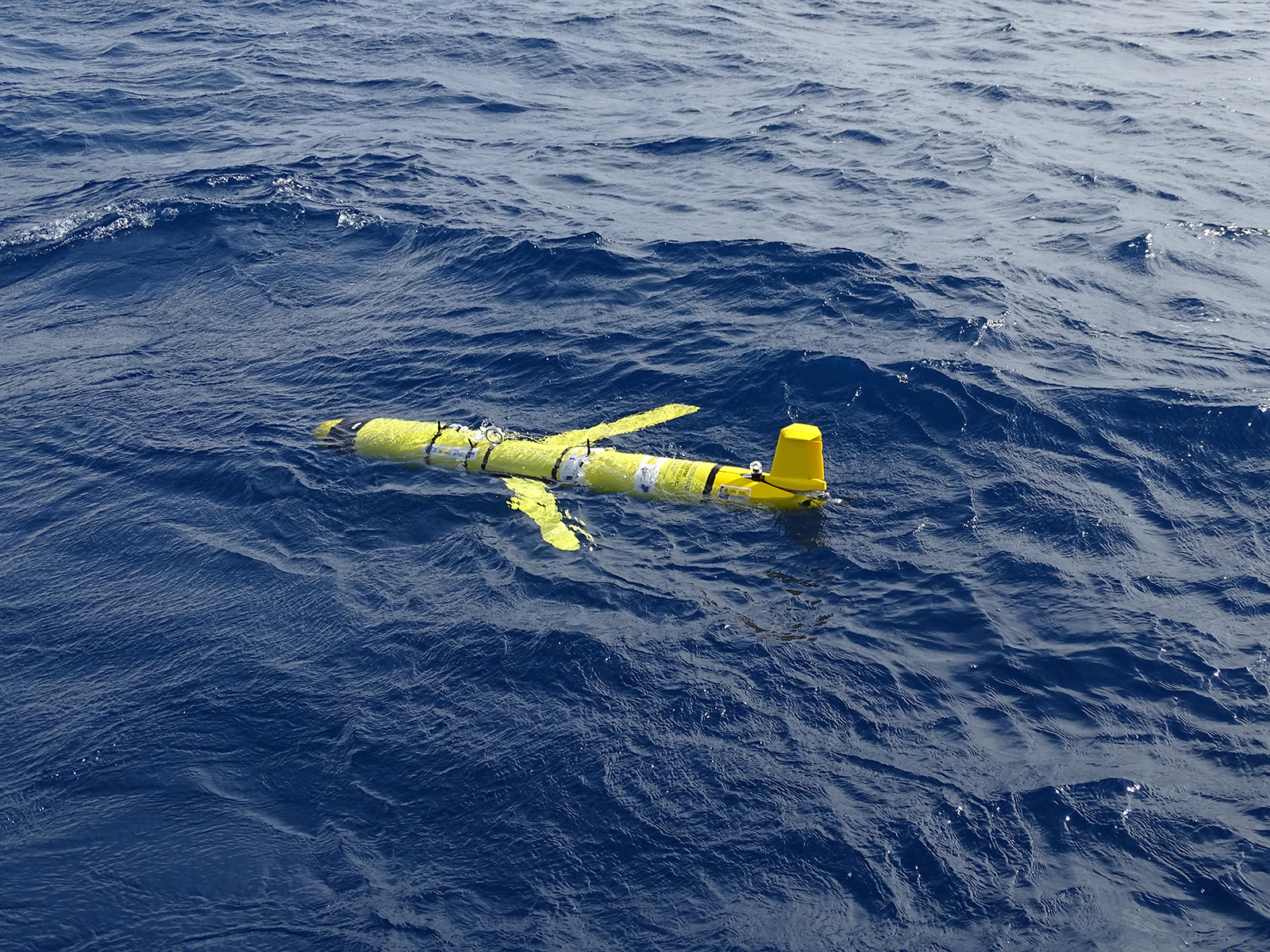
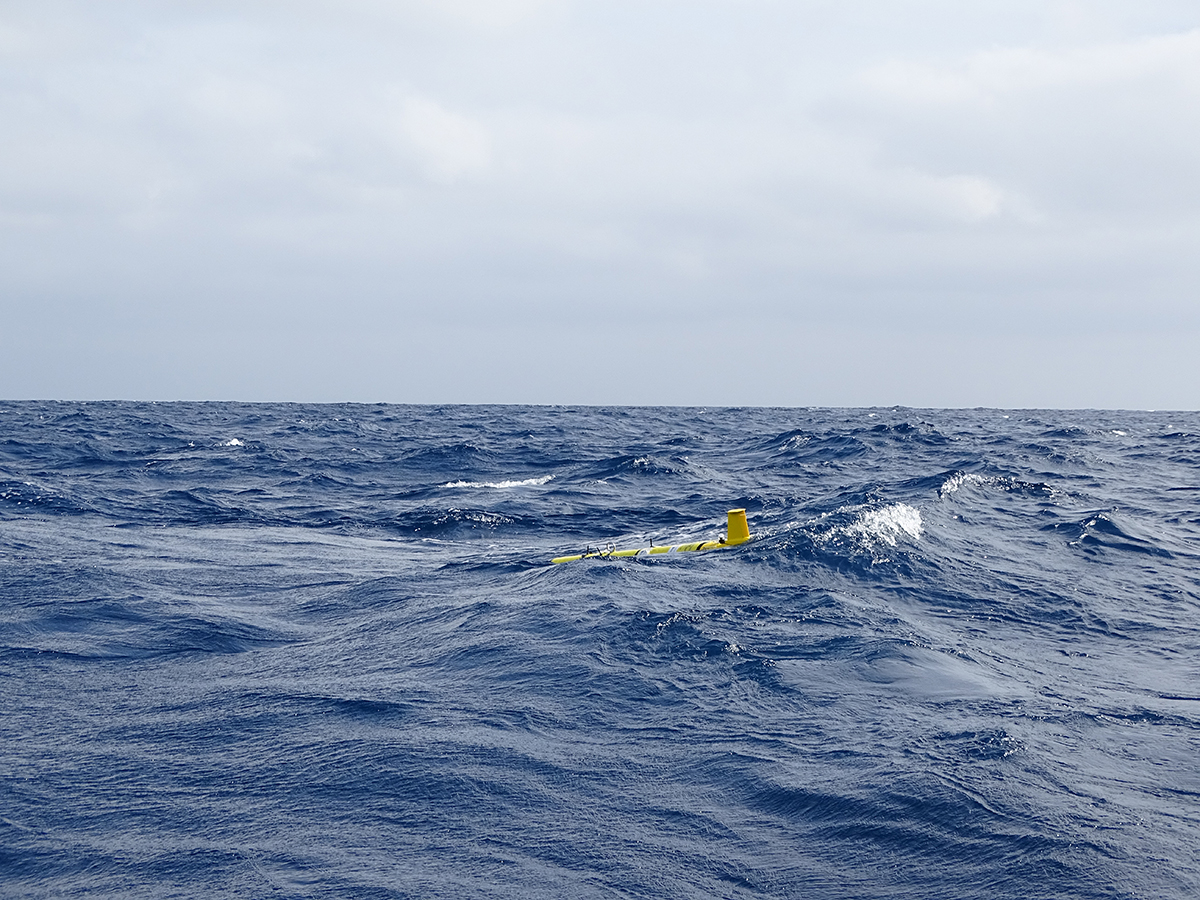
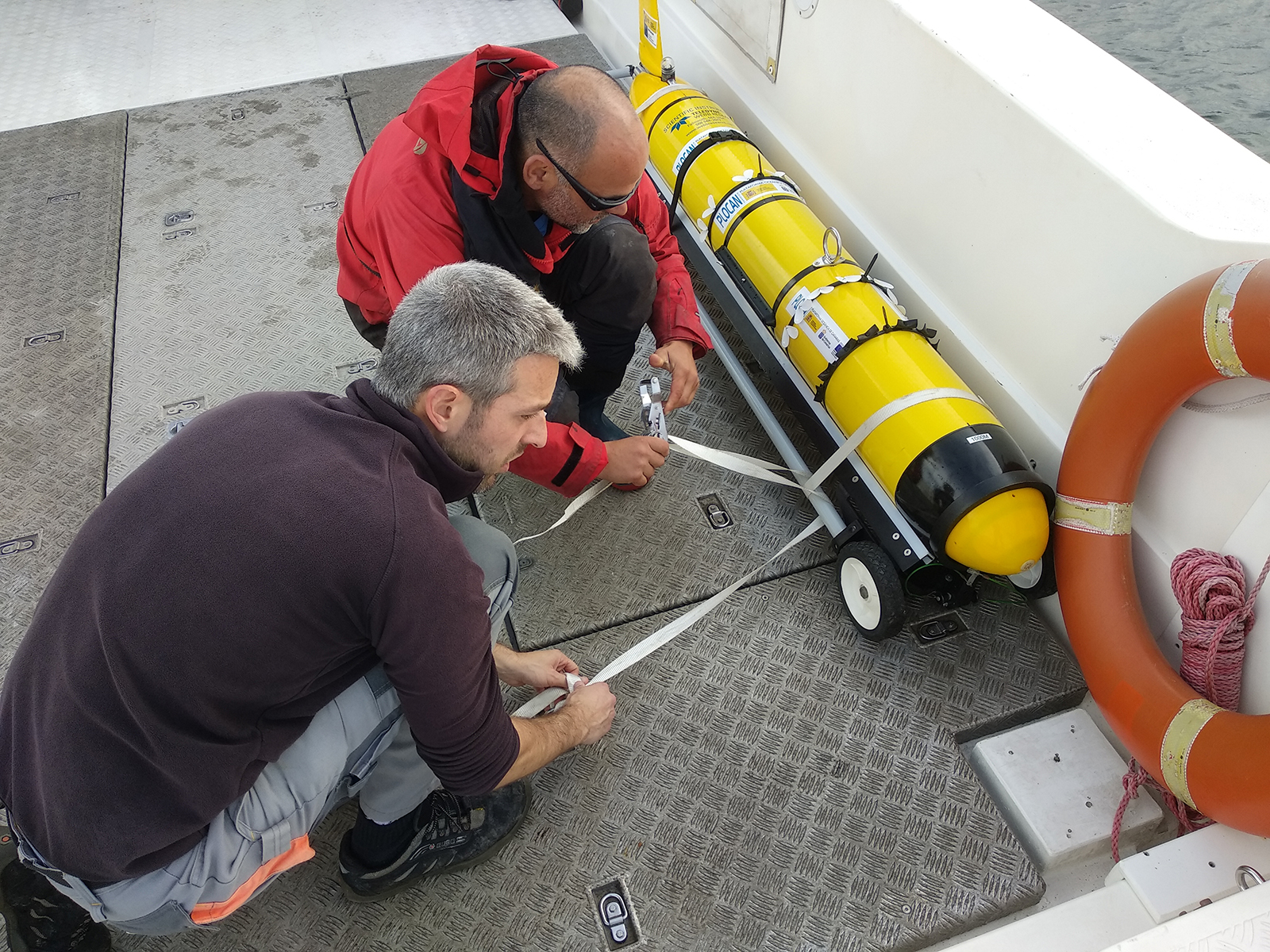
PLOCAN technicians put into operation in Taliarte waters an autonomous submarine glider model Slocum G2, manufactured by the company Teledyne Weeb Research, which observed for ten days the effect that the change of different navigation variables and the growth of biofouling, the unwanted accumulation of different organisms that affects the structures that unfold in the sea, have on the behaviour of the underwater glider.