
Access/Technology provider: UPORTO (UPorto-Local installation)
End User: University College London (UCL), UK [Academia]
End User feedback: (On repeating the experience and recommending it to others) “Yes. These projects can be very focused on a specific topic/problem within a limited time. Great infrastructure and people.”
Dates: 16-18 August 2021 & 2-3 November 2021
Goal: The project aims to develop a new method that detects, diagnoses and notifies the occurrence of faults on autonomous underwater vehicles (AUVs) via domain adaptation and transfer learning. The project outcomes will help increase the reliability of these platforms, thus contributing to the assurance of the operations of unmanned marine systems (UMS).
The project was carried out through the following steps:
- Development of the method for the detection of faults in the target domain using source domain data collected by similar but different AUVs and/or simulations;
- Verification of the developed method using historical data;
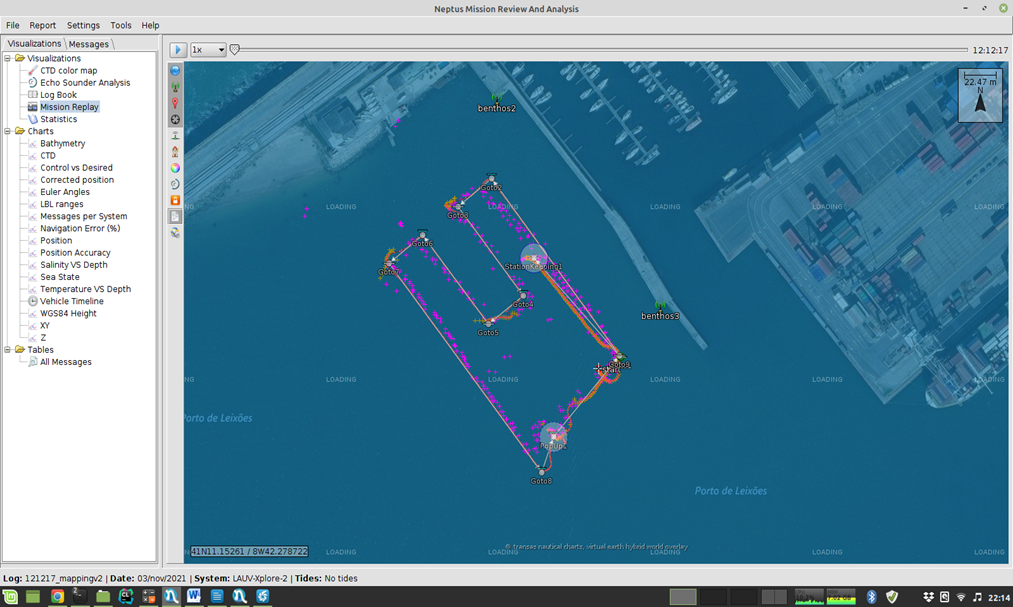
- Validation of the developed methods for two case studies with actual deployments of individual AUVs undertaking different tasks with emulated faults and normal operating status:
- a mapping AUV with stuck top and bottom vertical servomotors
- a profiling AUV with stuck top and bottom vertical servomotors.
- A novel data-driven anomaly detection and fault diagnostics method has been developed and validated through field tests. The method is based upon an improved Bidirectional Generative Adversarial Network (BiGAN) but has been further extended to deal with smart fault diagnostics for UMS with limited training data via transfer learning, achieving high fault diagnostics accuracy in the target domain. More specifically, using historical data collected distinctive AUVs in different missions, the anomaly detection model has successfully notified the occurrence of anomalies; the fault diagnostics model built upon the anomaly detection model has achieved good fault diagnostics performance..




The methods and outcomes of the project will be published in a manuscript in a high impact journal, namely the Journal of Field Robotics. Additionally, the results will be presented in a seminar internal to UCL open to undergraduate and postgraduate engineering students.